
Thứ sáu, 25/10/2024 | 01:57 - GMT+7
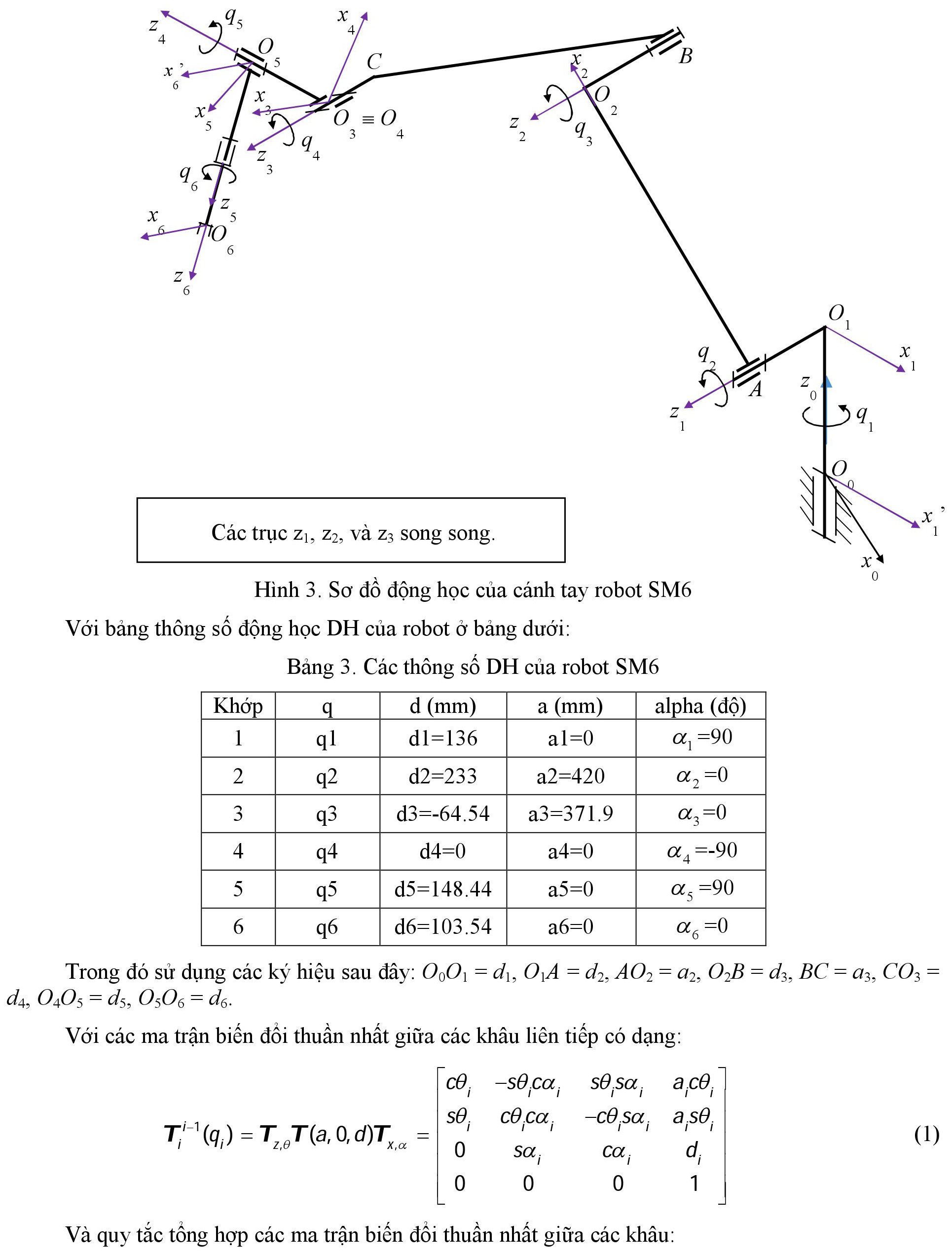
Bài báo trình bày các vấn đề động học và động lực học cho việc mô phỏng, thiết kế một dạng cánh tay robot 6 bậc tự do gọn nhẹ có khả năng ứng dụng trong nhiều lĩnh vực.
03/03/2020 - 08:25


Theo Tổ chức Phát triển Công nghiệp Liên Hợp quốc (UNIDO), nền kinh tế tuần hoàn là một chu trình khép kín, các chất thải được tái sử dụng, trở thành nguyên liệu cho sản xuất, từ đó giảm mọi tác động tiêu cực đến môi trường, hệ sinh thái và sức khỏe con người.
















