Trong thời gian gần đây, robot có thể giải khối Rubik và điều hướng trên địa hình hiểm trở của sao Hỏa, nhưng lại phải "vật lộn" với những công việc đơn giản như lăn một miếng bột hoặc cầm một đôi đũa. Ngay cả với hàng núi dữ liệu, hướng dẫn rõ ràng và đào tạo sâu rộng, chúng vẫn gặp khó khăn với những nhiệm vụ mà một đứa trẻ có thể dễ dàng thực hiện.
 Ảnh minh họa. Nguồn: MIT-IBM Watson AI Lab
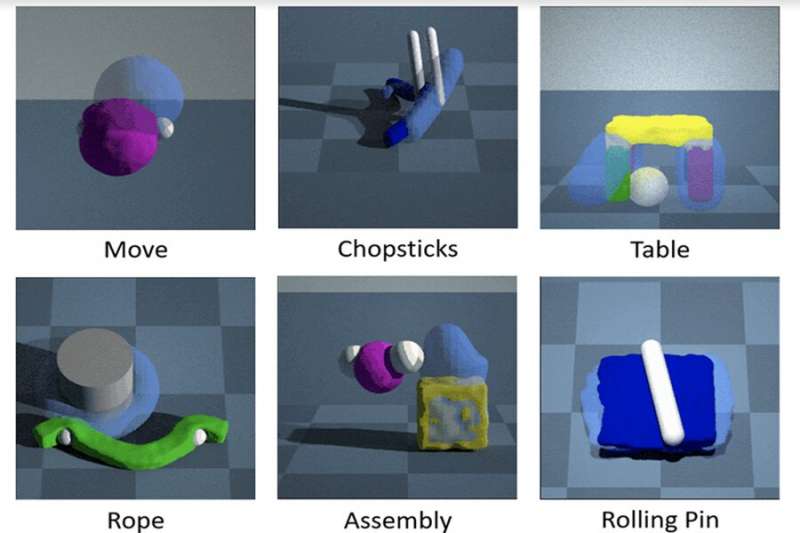
Ảnh minh họa. Nguồn: MIT-IBM Watson AI LabMột môi trường mô phỏng mới, PlasticineLab, được thiết kế để giúp việc học của robot trở nên trực quan hơn. Bằng cách xây dựng kiến thức về thế giới vật chất vào trình mô phỏng, các nhà nghiên cứu hy vọng sẽ giúp việc huấn luyện robot dễ dàng hơn trong việc điều khiển các vật thể và vật liệu trong thế giới thực mà thường bị uốn cong và biến dạng mà không trở lại hình dạng ban đầu. Được phát triển từ các nhà nghiên cứu tại MIT, MIT-IBM Watson AI Lab và Đại học California tại San Diego, trình mô phỏng này đã được trình diễn tại Hội nghị Quốc tế về Đại diện Học tập vào tháng Năm.
Trong PlasticineLab, nhân viên robot học cách hoàn thành một loạt các nhiệm vụ nhất định bằng cách thao tác với các vật thể mềm khác nhau trong mô phỏng. Trong phần Cán bột, mục đích là làm phẳng một miếng bột bằng cách ấn vào nó hoặc lăn qua nó bằng ghim; trong phần Dây, để quấn một sợi dây quanh một cây cột; và trong Phần Đũa, để nhặt một sợi dây và di chuyển nó đến vị trí mục tiêu.
Họ nói rằng các nhà nghiên cứu đã huấn luyện robot của họ để hoàn thành các nhiệm vụ này và các nhiệm vụ khác nhanh hơn so với robot được huấn luyện theo thuật toán học tăng cường, bằng cách nhúng kiến thức vật lý về thế giới vào trình mô phỏng, cho phép họ tận dụng các kỹ thuật tối ưu hóa dựa trên độ dốc để tìm ra giải pháp tốt nhất.
Tác giả chính của nghiên cứu, Zhiao Huang, cựu thực tập sinh của MIT-IBM Watson AI Lab, hiện là nghiên cứu sinh tại Đại học California tại San Diego cho biết: “Lập trình kiến thức cơ bản về vật lý vào trình mô phỏng giúp quá trình học tập hiệu quả hơn. . "Điều này mang lại cho robot cảm giác trực quan hơn về thế giới thực, nơi chứa đầy sinh vật sống và các vật thể có hình dạng linh hoạt."
Tác giả cấp cao của công trình, Chuang Gan, một nhà nghiên cứu tại IBM, cho biết: “Có thể mất hàng nghìn lần lặp lại để một robot có thể thành thạo một nhiệm vụ thông qua kỹ thuật thử-sai trong học tập củng cố, thường được sử dụng để đào tạo robot trong mô phỏng”. . "Chúng tôi cho thấy nó có thể được thực hiện nhanh hơn nhiều bằng cách nướng một số kiến thức về vật lý, điều này cho phép robot sử dụng các thuật toán lập kế hoạch dựa trên độ dốc để học."
Tiến sĩ Tao Du, đồng tác giả nghiên cứu, nghiên cứu sinh tại MIT cho biết: “Chúng ta có thể tìm ra giải pháp tối ưu thông qua lan truyền ngược, kỹ thuật tương tự được sử dụng để đào tạo mạng nơ-ron." "Truyền ngược cung cấp cho tác nhân phản hồi mà chúng cần để truyền thao tác các hành động của mình để đạt được mục tiêu nhanh hơn."
Nghiên cứu này là một phần trong nỗ lực không ngừng nhằm mang lại cho người máy khả năng hiểu biết thông thường hơn, để trong tương lai chúng có thể có khả năng nấu ăn, dọn dẹp, gấp quần áo và thực hiện các công việc khác trong thế giới thực.
Link: https://techxplore.com/news/2021-06-robots-soft-deformable.html
Hà Trần (Theo Tech Xplore)


















