Chủ nhật, 28/04/2024 | 21:45 - GMT+7
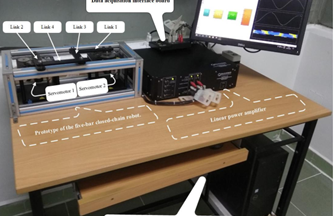
Bài báo này đề xuất hệ điều khiển thông minh hiệu quả cho đối tượng phi tuyến. Đối tượng được chọn là mô hình hệ cánh tay robot n-link bất kỳ