
Thứ bảy, 27/07/2024 | 14:08 - GMT+7
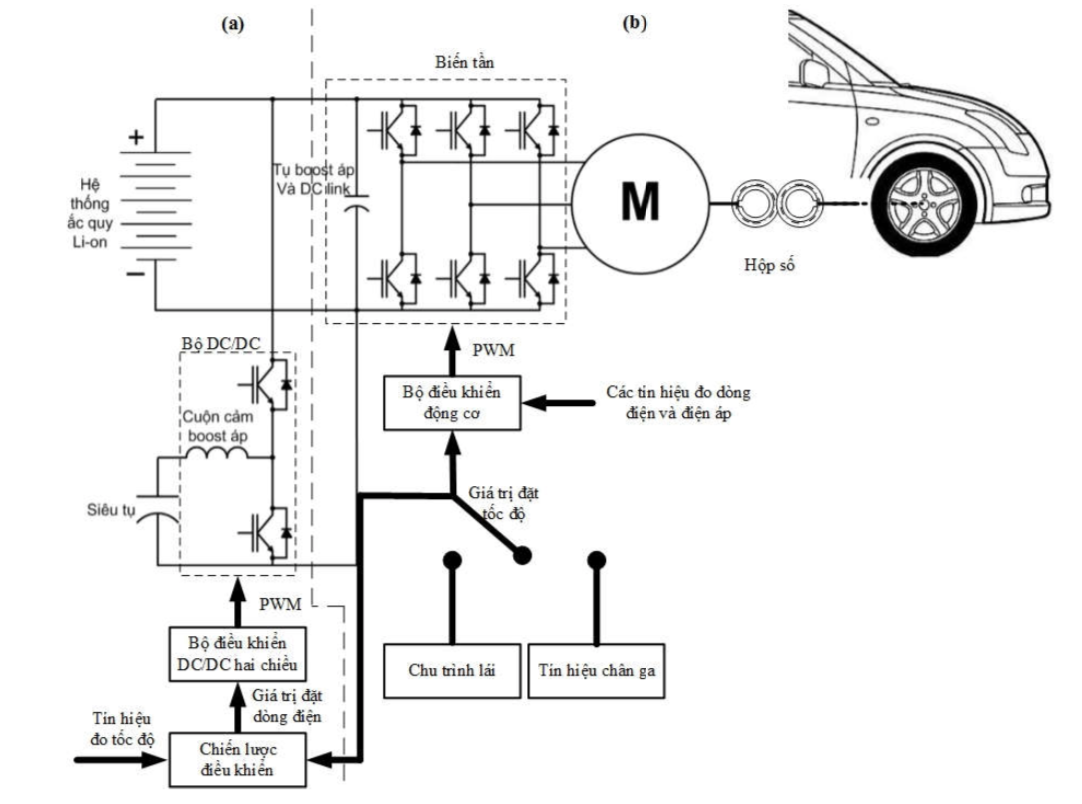
Bài viết miêu tả nghiên cứu về sử dụng hệ thống lưu trữ năng lượng lai giữa siêu tụ và ắc quy là giải pháp tốt trong quản lý năng lượng cho ô tô điện của nhóm tác giả trường ĐH Bách Khoa Hà Nội
22/04/2020 - 09:06
Trong đó: uchop và uSC là điện áp bộ biến đổi DC-DC và điện áp trên siêu tụ; ichop và iSC lần lượt là dòng điện của bộ biến đổi DC-DC và dòng điện siêu tụ; m là hệ số điều chế của bộ biến đổi DC-DC.
Hệ thống lưu trữ năng lượng kết hợp siêu tụ và ắc quy dẫn đến các mối quan hệ về dòng điện và điện áp trong hệ được biểu diễn bởi:


Tương tự như siêu tụ, nhóm tác giả sử dụng mô hình đơn giản để mô hình hóa ắc quy, trong đó VOC đại diện cho điện áp hở mạch của ắc quy và rbat là nội trở của ắc quy đại diện cho quá trình tự xả và tổn hao trên ắc quy:

3.1 Bài toán tối ưu trong quản lý năng lượng cho ô tô điện
Trong bài báo này, bài toán tối ưu trong quản lý năng lượng được đặt ra với mục đích cực tiểu hóa tổn thất trên ắc quy trong quá trình hoạt động và qua đó tối ưu hóa năng lượng tiêu thụ của xe cũng như tăng tuổi thọ của ắc quy.


3.2 Phương pháp quy hoạch động (DP) và điều kiện áp dụng phương pháp quy hoạch động




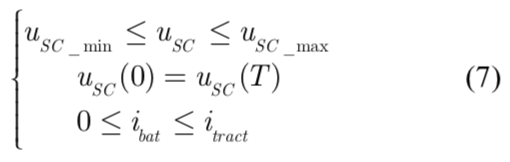
Xét hệ được mô tả bởi phương trình trạng thái (5) với các ràng buộc (7), phương pháp quy hoạch động được sử dụng nhằm tìm giá trị đặt tối ưu i*bat(t) sao cho hàm mục tiêu (6) là cực tiểu.





Giải phương trình (12), giá trị đặt tối ưu i*bat(t) được xác định như sau:








4. Kết quả mô phỏng và đánh giá
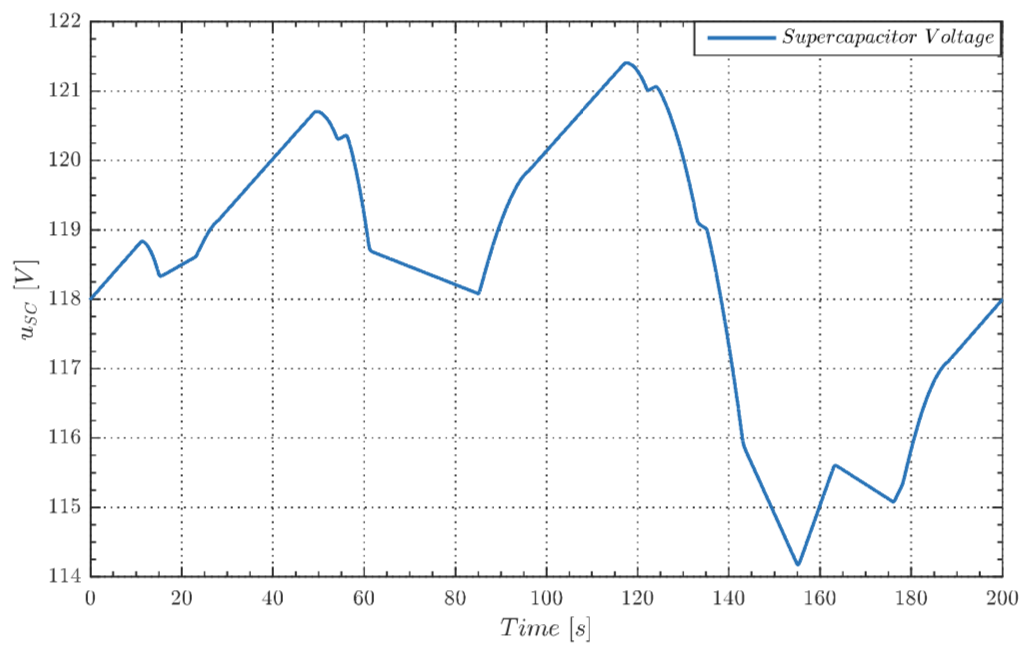
Sử dụng giá trị đặt tối ưu (15) trong mô phỏng với chu trình chuẩn ECE và dòng điện tải yêu cầu itract, kết quả thu được về dòng điện ắc quy, dòng điện siêu tụ, và điện áp siêu tụ lần lượt được trình bày trên Bảng 6, Bảng 7 và Bảng 8.


[1] T. Christen and M. W. Carlen, Theory of Ragone plots, Journal of Power Sources, vol. 91, pp. 210-216, 9th March 2000.
[2] S. S. Williamson, Energy Management Strategies for Electric and Plug-in Hybrid Electric Vehicles. New York: Springer, 2013.
[3] K. T. Chau and Y. S. Wong, Overview of power management in hybrid electric vehicles, Energy Conversion and Management 43 (2002) 1953–1968.
[4] C. C. Chan and K. T. Chau, An Overview of Power Electronics in Electric Vehicles, IEEE Transactions on Industrial Electronics, vol. 44, 1997.
[5] S. F. Tie and C. W. Tan, A review of energy sources and energy management system in electric vehicles, Renewable and Sustainable Energy Reviews, vol. 20, pp. 82–102, 2013.
[6] E. Vinot, R. Trigui, Y. Cheng, C. Espanet, A. Bouscayrol, and V. Reinbold, Improvement of an EVT-Based HEV Using Dynamic Programming, IEEE Transaction on Vehicular Technology, vol. 63, pp. 40-50, 2014.
[7] V. Ngo, T. Hofman, M. Steinbuch, and A. Serrarens, Optimal Control of the Gearshift Command for Hybrid Electric Vehicles, IEEE Transaction on Vehicular Technology, vol. 61, 2012.

Các chuyên gia cho rằng, Việt Nam đang có “thiên thời, địa lợi, nhân hòa” phát triển ngành công nghiệp chíp (vi mạch) bán dẫn, thời gian bứt phá chỉ khoảng 3 năm.
















